09 квітня 2026 року здобувач групи ЕСМКм-25-1 ОПП «Електронні системи та мережі комунікацій» спеціальності G5 «Електроніка, електронні комунікації, приладобудування та радіотехніка» Іван ШВЕЦЬ виступив з науковою доповіддю та захистом роботи на II (міжнародному) етапі конкурсу студентських наукових робіт «Black Sea Science 2026», здобувши III призове місце за рішенням міжнародного журі. Науковий керівник: д.т.н., професор, гарант ОПП — Юлій БОЙКО.
Конкурс проводився на базі Одеського національного технологічного університету під егідою МОН України, Black Sea Universities Network (BSUN) та ISEKI-Food Association (http://isc.ontu.edu.ua/). Участь у II етапі є результатом успішного відбору наукової роботи здобувача міжнародним журі за підсумками I етапу конкурсного відбору.

Тема наукової роботи «MONITORING SYSTEM FOR ELECTRIC SCOOTERS BASED ON IoT AND WEB TECHNOLOGIES» та присвячена проектуванню системи моніторингу електросамокатів на основі технології інтернету речей (IoT) та вебтехнологій.
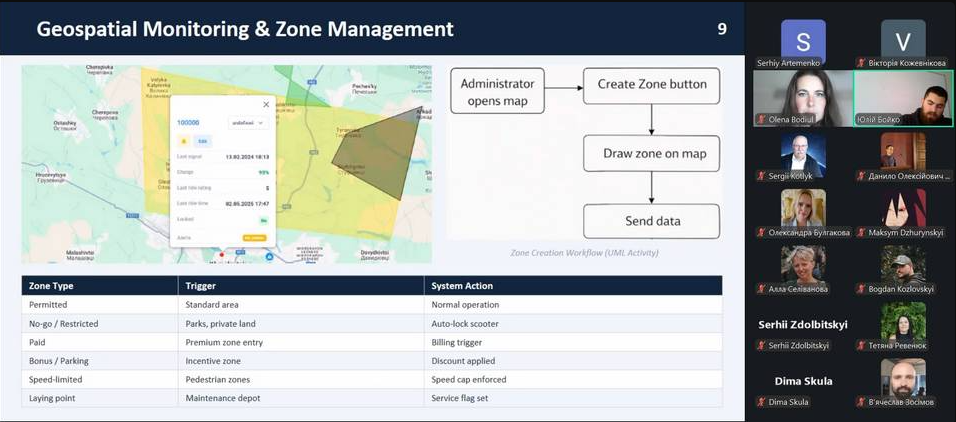
Наукова новизна роботи полягає в інтеграції трьох компонентів у єдиній системі, а саме збір IoT-телеметрії, комунікація в реальному часі на основі WebSocket та інтерактивна веб-візуалізація — спеціально адаптовані для моніторингу електросамокатів. На відміну від традиційних рішень GPS-трекінгу, запропонований підхід поєднує легкий апаратний модуль на базі ESP8266 із сучасною повностековою веб-платформою, побудованою на AdonisJS та TypeScript. Система реалізує інтелектуальне територіальне зонування — зокрема дозволені, обмежені, платні, бонусні та швидкісні зони — з автоматичним виявленням порушень та механізмом сповіщень, що є нетиповим для відкритих дослідницьких реалізацій.
Крім того, система спроєктована відповідно до методології UML-моделювання, де концептуальні моделі системно трансформовані у функціональні та схемотехнічні представлення, що забезпечує архітектурну узгодженість між проєктним рішенням та його програмною реалізацією.
За результатами проведеного дослідження отримано такі нові наукові результати. Спроєктована та реалізована функціональна багаторівнева клієнт-серверна архітектура, що забезпечує збір, передачу, обробку та візуалізацію телеметрії флоту електросамокатів у режимі реального часу. Розроблений апаратно-програмний прототип на базі мікроконтролера ESP8266, що здійснює передачу телеметричних даних — GPS-координат, напруги батареї, швидкості та операційного статусу — через канал Wi-Fi на сервер у реальному часі. Реалізований модуль інтелектуального управління зонами з автоматичним виявленням порушень правил експлуатації та можливістю адміністративного контролю безпосередньо з веб-інтерфейсу з інтеграцією Google Maps. За результатами комплексного тестування на рівнях модулів, інтеграції, системи та користувацького інтерфейсу підтверджено стабільну роботу системи як у штатних, так і в граничних умовах, а також відповідність усім визначеним функціональним та нефункціональним вимогам. Практичне розгортання системи у локальному середовищі підтвердило її готовність до реального застосування та потенціал для масштабування і інтеграції з інфраструктурою розумного міста.
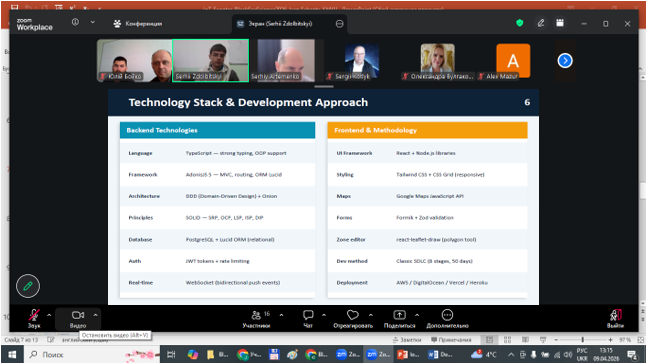
В розробці системи використано наступне програмне забезпечення та технології. Мова програмування — TypeScript, обрана за сувору типізацію, підвищену надійність коду та продуктивність розробки. Серверний фреймворк — AdonisJS, сучасний Node.js-фреймворк, що забезпечив реалізацію RESTful API, MVC-архітектури, middleware, HTTP-контролерів та компонентів валідації. База даних — PostgreSQL, використана для постійного зберігання даних, а реляційні відображення та побудова запитів реалізовані засобами Lucid ORM. Комунікація в реальному часі забезпечена протоколом WebSocket, що надає двосторонній низьколатентний обмін повідомленнями між сервером та веб-клієнтом. Картографія та геолокація реалізовані через Google Maps JavaScript API — для інтерактивної візуалізації розташування самокатів у реальному часі, відображення зон, кластеризації маркерів та перегляду історії маршрутів. Вбудоване програмне забезпечення — власний код прошивки мікроконтролера ESP8266, що реалізує збір телеметрії, Wi-Fi-комунікацію та логіку передачі даних. На етапі проєктування застосовано UML-моделювання — діаграми використано для опису структури системи, логіки взаємодії та операційних сценаріїв до початку реалізації. Тестування проводилось на кількох рівнях: модульному, інтеграційному, системному та ручному тестуванні користувацького інтерфейсу — для підтвердження коректності та стабільності роботи системи.
Розроблена система має значну практичну актуальність для України з кількох причин. Міська мобільність в українських містах зазнає стрімкої трансформації, а електросамокати стають дедалі поширенішим засобом пересування. Водночас ефективні інструменти управління флотом електросамокатів — особливо відкриті, доступні та адаптовані до місцевих умов — залишаються обмеженими. Розроблена система усуває цей дефіцит, пропонуючи економічно доступне рішення з відкритою архітектурою на базі широкодоступного апаратного забезпечення (ESP8266) та відкритих веб-фреймворків, що є особливо важливим в умовах обмежених ресурсів. У ширшій перспективі система може слугувати компонентом інфраструктури розумного міста, підтримуючи муніципальні органи в управлінні сервісами мікромобільності, контролі дотримання зональних регламентів та оптимізації енергоспоживання транспортних засобів. У довгостроковій перспективі архітектура підготовлена до інтеграції з аналітикою на основі штучного інтелекту, прогнозування навантаження та предиктивного технічного обслуговування — критичних напрямків розвитку інтелектуальних транспортних систем в українських містах.
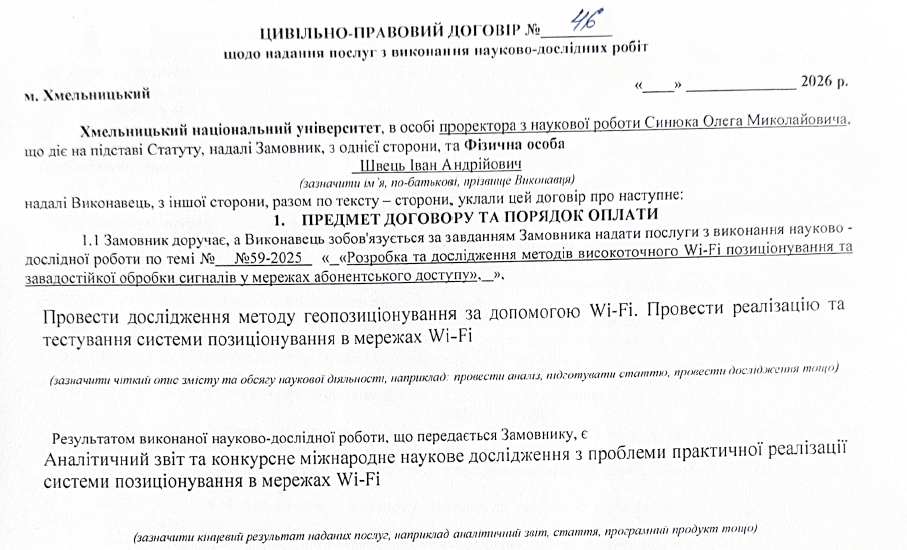
Представлена наукова робота є складовою частиною госпдоговірної науково-дослідної роботи, що виконувалась кафедрою телекомунікацій, медійних та інтелектуальних технологій у 2025–2026 роках на замовлення стейкхолдера — телекомунікаційної компанії X-City (https://surl.lt/nipkus) — за договором № 59-2025 на тему «Розробка та дослідження методів високоточного Wi-Fi позиціонування та завадостійкої обробки сигналів у мережах абонентського доступу». В рамках зазначеної НДР здобувач групи ЕСМКм-25-1 Іван Швець виконував індивідуальні дослідницькі завдання, безпосередньо пов’язані з тематикою госпдоговірної роботи: дослідження методів геопозиціювання в мережах Wi-Fi та практичне тестування системи позиціювання в умовах реальної мережевої інфраструктури. Результати цих досліджень знайшли відображення у розробленій системі моніторингу електросамокатів, де Wi-Fi-комунікація на базі модуля ESP8266 виступає ключовим каналом передачі телеметричних даних, а точність геолокації та стійкість з’єднання є критичними параметрами функціонування системи в цілому. Представлена робота демонструє органічний зв’язок між фундаментальними дослідженнями кафедри у сфері бездротових мереж та їх практичною апробацією у прикладній інженерній розробці, що здійснювалась здобувачем у межах реального науково-виробничого замовлення від індустріального партнера.
Таким чином, здобуття здобувачем групи ЕСМКм-25-1 Іваном Швецем III призового місця на II (міжнародному) етапі конкурсу «Black Sea Science 2026» підтверджує високий рівень наукової підготовки здобувачів ОПП «Електронні системи та мережі комунікацій» (https://khmnu.edu.ua/wp-content/op/m/g5-esmk-2025.pdf) та міжнародне визнання результатів їхньої дослідницької діяльності. Наукова робота, виконана в рамках госпдоговірної НДР кафедри ТМІТ, поєднує фундаментальні дослідження у сфері бездротових мереж із прикладною інженерною розробкою, що свідчить про інтеграцію навчального процесу з реальною науково-виробничою діяльністю кафедри. Присудження III місця міжнародним журі за секцією «Інформаційні технології, автоматизація і робототехніка» є підтвердженням відповідності наукових результатів здобувача міжнародним стандартам якості та актуальності досліджень у галузі електронних систем та мереж комунікацій, IoT, вебтехнологій та систем моніторингу мікромобільності.
Гарант ОПП G5 «Електронні системи та мережі комунікацій», д.т.н., професор Юлій БОЙКО